切换行业
切换行业

兆瓦级风力发电机组中,变桨系统拥有着转速调节和安全保障的重要作用。随着电动变桨技术的不断进步,电动变桨系统由原先的直流离散式发展到如今的交流集成式,其核心器件变桨驱动器的集成度也越来越交流集成式变桨系统的可靠性较直流离散式变桨系统的可靠性有了质的飞越。今天我们来谈谈变桨的不起眼的致命部件-制动电阻。
01
制动电阻失效=致命?
制动电阻失效后,驱动器将面临全面失效,导致桨叶无法安全顺桨,最终容易引起风机超速甚至是倒塔事故。以下为风机因变桨故障导致的超速起火和倒塔事故相关图片,仅供参考。




注:以上图片来自网络
1.1 制动电阻的作用和集成式驱动器拓扑
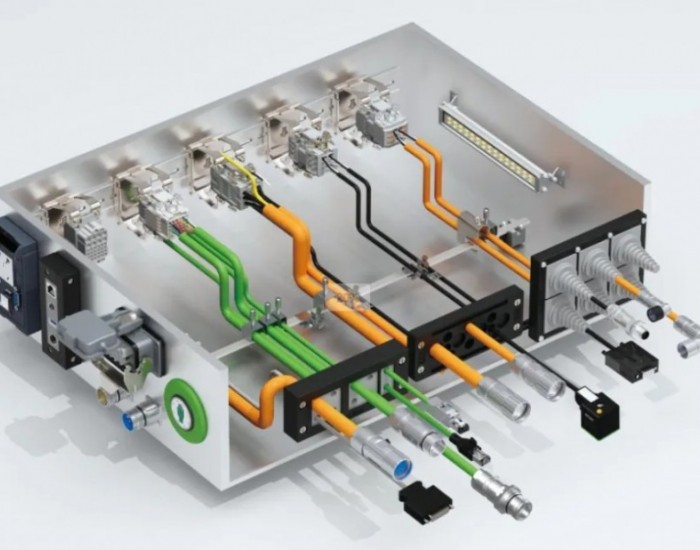
图1-1所示为典型交流集成式变桨驱动器的拓扑,主要功率回路如下所示:400V电网电压经半控整流至直流母线,直流母线上装置有母线电容稳压蓄能,并且装置了制动电阻进行母线过压时的能量泄放,另外集成式变桨驱动器的内置24VDC电源通常从直流母线取电,直流母线的最后端为拖动电机的逆变单元。

图1-1 集成式变桨驱动器拓扑
1.2 制动电阻作用1——变桨电机发电模式能量消耗

图1-2 变桨系统转速-转矩散点图
图1-2所示为某陆上2MW风电机组变桨系统转速-转矩散点图,图中红色框内部分为变桨电机发电模式,其能量需要回馈至直流母线,并通过制动电阻进行消耗。从图中可以看出,变桨系统发电模式时,其变桨电机最大转速可达1800rpm,最大转矩可达55Nm。
根据该2MW发电模式可计算出发电模式下,制动电阻最大能量泄放功率可达:

按照制动电阻常规40倍过载系数选取,则陆上2MW风电机组在变桨电机发电模式下制动电阻额定功率最小选取为259W,考虑陆上风电机组至少20%的降额,则陆上2MW风电机组制动电阻额定功率需大于323W。
现今海上风电机组基本从4MW起步,在变桨系统发电模式下,其变桨电机最大转速约为1500rpm,最大转矩可达80Nm左右,则发电模式下制动电阻最大能量泄放功率可达:

按照制动电阻常规40倍过载系数选取,则海上4MW风电机组在变桨电机发电模式下制动电阻额定功率最小选取为314W,考虑海上风电机组至少30%的降额,则海上4MW风电机组制动电阻额定功率需大于449W。
1.3 制动电阻作用2——变桨电机减速能量消耗
以图1-2所示某2MW风机为例,其电机和负载总转动惯量为0.024kg?m^2,变桨电机最大转速为1800RPM,减速时间为0.2s,若其在最大转速时进入减速模式,将转速降至0,则其产生的制动转矩为:

其制动时间内最大功率为:

按照制动电阻常规40倍过载系数选取,则变桨电机减速能量泄放模式下制动电阻额定功率最小选取为100.65W,考虑20%降额至少选取126W。在独立变桨或者频繁快速变桨的应用场合,至少考虑50%降额至201.3W以确保安全。
1.4 制动电阻作用3——电网过压能量消耗
我国风电机组高穿标准的最大电压为130%过压维持200ms风机不脱网运行,但是往往很多风电场电能质量极差,经常出现140%的高压,海上风电机组甚至出现过170%的短暂超高压,以140%过压为例,制动电阻能量泄放功率为(制动电阻阻值一般为12Ω):

按照制动电阻短时最大70倍过载系数选取,则在电网过压情况下制动电阻额定功率最小选取为680W。
因此,电网过压时,小功率制动电阻完全无法承受,驱动器整流侧必须具有电网调压功能,以保证网侧电压的升高不会导致制动电阻失效。
02
制动电阻失效的风险

图2-1 制动电阻烧毁的风险
如上所述,制动电阻在变桨系统中有着极其重要的作用,其功率选择一般在320W至1000W之间,若制动电阻选择过小导致制动电阻烧毁,则图2-1中所示的母线电容会过压失效,驱动器内置24V电源也会面临失效,则整个驱动器损毁,该轴桨叶无法顺桨。下面以上述2MW风机变桨参数进行制动电阻烧毁后的母线过压失效计算。
一般驱动器母线电容为容值为1600 uF,母线电容失效电压为900V,母线正常工作电压为560V,则电机减速导致母线电容失效的能量为:

以变桨电机从转速n(rpm)减速至0rpm来计算制动电阻失效后的最大制动速度差,则最大转速差n为:

1737rpm转速小于最大转速1800rpm,因此直流母线会损毁失效。
因此,制动电阻损毁后,只要一次减速过程则会让整个驱动器失效,进而导致桨叶无法安全顺桨,对风电机组危害极大。
03
结论及制动电阻设计建议
1、2MW以上风电机组变桨系统单轴制动电阻功率额定应至少在323W以上,随着风电机组的容量增大,制动电阻额定功率也应相应变大;
2、海上4MW以上风电机组变桨系统单轴制动电阻功率额定应至少在449W以上,随着风电机组的容量增大,制动电阻额定功率也应相应变大;若海上风电电网波动较大,则需要进一步考虑制动电阻40%的降额,制动电阻额定功率应至少在523W以上;
3、为了保证变桨系统的安全性,制动电阻必须进行双电阻冗余设计,以保证其单个电阻失效后,不至于驱动器全面损毁,可以继续安全顺桨;
4、为了防止制动电阻过载烧毁,驱动器整流侧应有相应的调压措施,以保证网侧电压的升高不会导致母线电压升高,也就不会投入制动电阻进行能量消耗;
5、驱动器加减速过程中的减速时间不应设置过小,减速时间值需要针对制动电阻能够承受的功率进行合理计算,以保证制动电阻的安全。在独立变桨或者频繁快速变桨的应用场合,应采取更大幅度的降额以确保安全。




 正在加载...
正在加载...