切换行业
切换行业

导读
随着我国海上风电大规模的投入使用,近海资源逐渐趋于饱和,海上风电正逐渐走向“深蓝”。与此同时,海上风电支撑结构形式也伴随水深变化,从固定式支撑结构到漂浮式支撑结构进行演变。漂浮式海上风电作为一种能够开发更深、更远海上风资源的技术,有助于扩大对海上风资源的利用范围,突破水深对立柱式海上风电施工带来的限制,同时也能有效降低施工对海洋环境的负面影响。
2021年7月,中国科协在第二十三届中国科协年会闭幕式上发布了10个对科学发展具有导向作用的前沿科学问题、10个对工程技术创新具有关键作用的工程技术难题,并首次发布10个对产业发展具有引领作用的产业技术问题。其中在产业技术问题中,提到了“如何攻克漂浮式海上风电关键技术研发与工程示范难题?”。开展深海漂浮式海上风电技术研发与样机示范项目探索,有利于我国掌握技术制高点,在深远海海上风能资源竞争中占据优势,有利于储备研发力量,为将来大规模开发深远海资源奠定基础,同时,也为“一带一路”和“走出去”战略打下基础的良好契机。
漂浮式海上风电的发展动力主要来自于发展需要、资源禀赋、政策激励等多个方面。我国漂浮式基础的研究已开展多年,目前行业内也已呈现出越来越多企业开展研究的局面。立足于国际市场,着眼于未来5年,当能源转型、应对气候变化,或者战略需要“能源岛”建设时,积极布局漂浮式风电的企业就会拥有良好的发展先机。因此本文综合海上风电关键技术和国内外建成的漂浮式风机案例进行分析,以期为我国技术研发及工程示范带来一些参考。
漂浮式风电基础形式
我国现有的海上风电主要采用固定式基础安装在浅海区域(小于30m水深),随着水深增加导致固定式风力机建造安装费用急剧增加,水深大于50-60米以后,漂浮式风机系统建造成本将大幅降低,因此,水深大于50米的海域一般采用漂浮式基础作为风机的支撑平台。

图1 海上风电基础结构演变图
1972年,美国马萨诸塞大学安默斯特分校的Heronemus教授首次提出了海上漂浮式风电的技术概念,但限于当时的技术水平和高昂的建设成本,相关技术并未引起广泛关注。随着技术发展至今,海上漂浮式风机极大地拓展了海上风电的应用范围,并且具有诸多的优势,例如:机位部署更加灵活、可在岸上完成整体组装、海上施工安装更加方便、可完全拆解与迁移、可搭载更大功率的风电机组等。近年来随着海上风电单机功率大型化和海上风场走向深远海,漂浮式风机技术正成为热点研究方向之一,不断地涌现出新形式,但大体可按照其静稳性原理将之划分为立柱式(Spar)、半潜式(Semi)、张力腿式(TLP)、驳船式(Barge)。
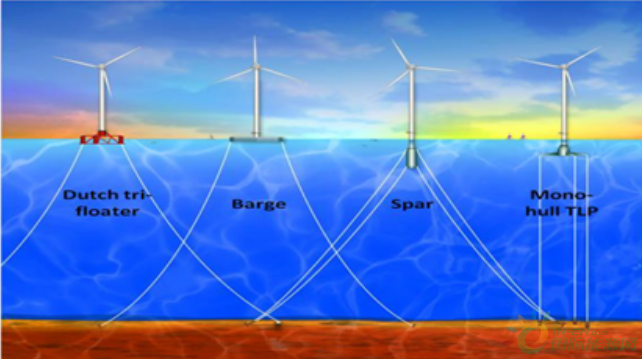
图2 海上漂浮式风电的基础形式
立柱式(Spar):该类型平台的重心设计远低于浮心。当平台发生倾斜时,重心和浮心之间形成回复力偶可抵抗平台的倾斜运动;与此同时,较小的水线面设计,可减小平台垂荡运动,但较大的平台吃水设计导致其对工作水深有特定的要求,通常要求大于100 m水深。
半潜式(Semi):该类型平台在风机倾斜时,可通过分布式的浮筒结构产生较大的水线面变化,进而产生抵抗平台倾斜运动的回复力矩;适用水深通常大于40 m,适用水深范围较广;平台的各方向运动适中,但对低频波浪二阶力较为敏感;可采用湿拖法运输,部署灵活,技术较为成熟。
张力腿式(TLP):该类型平台通过垂向下的系泊张力平衡浮体向上的超额浮力,类似“上下绷紧”的结构;因此,具有较好的平台垂向运动性能,但是其安装过程较为复杂,且张力腱结构造价较高,目前国内缺乏相关的制造和施工安装经验;适用水深通常大于40 m,对高频波浪二阶力敏感。
驳船式(Barge):该类型平台类似于船型,利用平台浮力抵消重力,适应水深通常大于30 m,垂向运动固有频率在一阶波浪频率范围内,故波频响应较为敏感,设计时需要进行平台运动频率优化;结构形式简单,容易制造,稳性较好,可采用湿拖法整体运输,部署灵活且成本较低。
漂浮式风电关键技术
1稳性校核研究
海洋工程结构物稳性指的是在其在拖航、安装和使用过程中,结构物所具有的抗倾覆和抗滑移的能力。在海上漂浮式风机的设计工作中,首要的目标是能够保证其漂浮式基础的稳性,以保障其在服役的各阶段不发生倾覆性后果。因此,海上漂浮式风机设计的首要步骤是进行相应的稳性计算与校核,可依据不同阶段,划分为拖航、安装和使用过程的稳性校核。另外,根据浮体是否发生破舱(压载舱)事故,又可以分为完整稳性校核和破舱稳性校核;其中,破舱稳性校核作为事故工况中较危险的情况,设计时需要格外注意。
当前海上漂浮式风机还没有成熟完善的规范指导其稳性计算与校核工作,国内外研究者主要以海洋油气平台的相关规范作为漂浮式风机稳性校核参考;根据现有规范要求,浮体摇摆角度和力矩关系如图3所示。

图3 浮体摆角与力矩关系图
当浮体受到外部倾覆力矩时,从正浮状态逐渐倾斜至第二交点或进水角处的复原力矩曲线下的面积中的较小者,至少应比至同一限定角处的风倾力矩曲线下的面积大30%,且复原力臂在上述的范围内要保持正值和回复力消失角(回复力矩曲线与倾斜轴的第二个交点)大于36度。依据现有的船舶与油气平台设计经验,提高漂浮式风机稳性的措施主要有降低浮体的重心、增加浮体的干舷、增加浮体的宽度、注意浮体水线以上的开口位置和风雨密性及水密性等。
2系泊系统的研究
漂浮式风机作为海上浮式结构物,需要通过系泊系统进行位置和运动的约束,其力学作用机理主要通过系泊材料的变形或悬空重量改变来提供约束张力。系泊系统通常包含绞车、导缆设备、系泊线、锚、重力和浮力套件等组成。
常见的系泊形式包括悬链线式系泊、伞型张紧式系泊、垂向张力腿系泊。对于立柱式、半潜式和驳船式海上漂浮式风机,常采用的是悬链线式系泊,系泊线通常为钢链结构;钢链由许多链环连接而成,链环分为有档环和无档链环两种,钢链因其制造成本低、工序简单、强度高等优点,成为运用最广泛的系泊材料。系泊线的预张力主要取决于锚链的悬空段,锚链的回复力主要通过锚链悬空段的变化来实现;但是这种系泊方式存在较长的海床平躺段,因此所占据的海床空间较大,重量随着水深增加而急剧增大。为了克服上述问题,有时可采用伞型张紧式系泊,该系泊线采用钢缆或者其他复合材料,钢缆由钢丝组成,其常见的形式有六股式、螺旋股式、多股式等;同等断裂强度下,钢缆的重量仅为锚链的20%,因此深水系泊系统为了降低系泊重量常采用钢缆系泊;此时系泊线的约束张力主要依赖于缆索的拉伸变形而非悬空段自重,所搭配的海床锚固装置需要承受水平张力之外,还需要承受较大的垂向张力。钢缆成本较钢链高,且材料呈现非线性的力学特征,系泊松弛后重新张紧时,会带来跳跃性的冲击载荷,对缆索强度和疲劳问题带来了较大的威胁;因此,在设计时可结合钢链和钢缆特性进行分段设计,以获得更优的系泊动力性能。
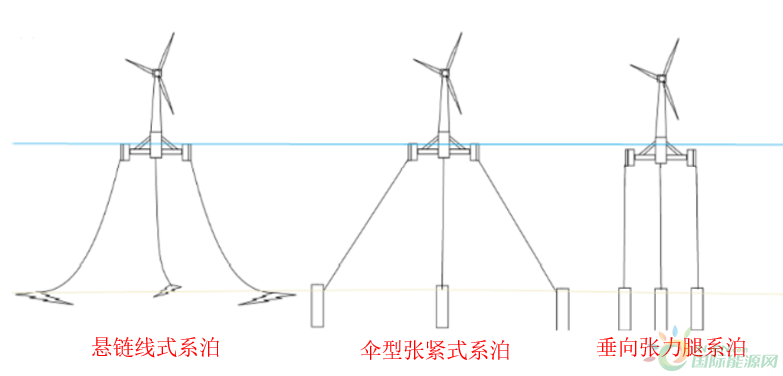
图4 常见的系泊形式
对于张力腿式海上漂浮式风机而言,常采用垂向张力腿系泊,该类型的系泊线常采用合成材料。合成材料在系泊系统上的使用日益频繁,合成纤维材料通常有尼龙(聚酰胺)、聚酯、聚丙烯和聚乙烯等。在同等规格下,合成材料制成的缆绳比重小,耐磨性好,有较大的回复力;但以合成纤维为组成成分的缆绳也有其弊端,如缆绳的轴向刚度随轴向张力作用时间发生变化,容易偏移,也容易打滑而产生蠕变,因此每隔几年需要重新张紧调整。该类型系泊与海床的锚固装置需要承受较大的垂向张力,顶部预张力可通到绞盘进行微调节;由于张紧状态使得张力腿的固有频率较高,当在外界激励作用下,如流体引起的涡激振动和二阶和频波浪力等,都有可能引起张力腿发生高频弹振和颤振问题,继而发生疲劳损伤。
浮体的系泊线需要通过锚固装置与海床进行连接,根据锚固装置的形式和力学特性,可大致将其划分抓力锚、重力锚、桩锚、吸力锚四种。
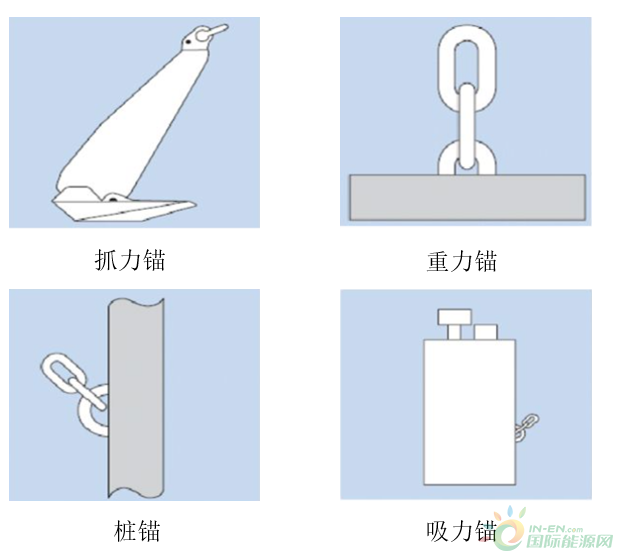
图5 锚固装置分类
抓力锚(拖曳嵌入式锚)是目前使用最广泛的一种锚固结构,其部分或全部嵌入海底,主要靠锚的前部结构与土壤的摩擦力来抵抗外力,能承受较大的水平力,但垂向力承受能力不强,常与悬链线系泊的锚链搭配使用。
重力锚主要通过压载与海床表面的摩擦力来抵抗锚链的水平张力,通过压载重量来抵抗锚链的垂向张力;随着锚链的垂向张力水平要求的提高,设计的重力锚需要更大的压载体积,而且水平张力通常难以单纯通过压载和海床之间的摩擦力进行平衡,其性能与海床息息相关,限制了其使用范围。
桩锚通过向海床打入桩基,通过桩基与土壤之间的作用力来提供锚链的水平张力和垂向张力;但是在深水区域作业时,施工费用较高。
吸力锚类似于桩锚,通过安装于钢筒顶部的人工泵使钢筒内外出现压力差,当钢筒内压力小于钢筒外时,钢筒随即被吸入海底,然后将泵撤走,能够承受系泊线的水平张力和垂向张力。
为了改善系泊线的动力性能,有时需要增设块重和浮力器件进行调节;块重的形式有集中式和分布式。通常而言,安装集中式块重的锚泊的静态响应较佳,而安装分布式的块重的锚泊的动力响应较佳。锚泊线上的浮力器件主要有浮筒、浮球和浮箱等;在悬链线锚泊上设置浮力器件可以有效地降低锚泊线的动张力,但通常会降低锚泊的水平刚度。在张力腿上设置浮力器件可抵消锚泊自重,使其成为完全的张力部件。
3动态海缆的研究
海上风电需要通过海底电缆送出电能,相比固定式风机而言,漂浮式风机由于支撑平台运动具有一定范围,因此电缆近端需要采用动态海缆技术,并且需要利用浮力单元将海缆悬挂,呈现“S”形态,以使得海缆在一定的摆动范围内可随平台运动,起到缓冲的作用。动态海缆跟随浮体运动的过程中,会受到相对运动的海流作用,因此承受较大的弯矩、剪切和扭矩的综合作用,受力特性复杂。
目前,学术界和工业界对于漂浮式风机的动态海缆研究缺乏系统性和深入性。在漂浮式风机一体化计算过程中,绝大多数采用分离的做法,即浮体运动不考虑海缆的存在,忽略海缆与浮体之间的耦合约束。海缆的设计存在极限长度和极限弯曲角度限制,这对浮体的运动,尤其是极端工况下的运动提出了限制性需求。
4水动力特性的研究
与固定式的海上风机相似,漂浮式风机服役的海洋环境中同时受到风、浪、流等环境载荷的作用;但漂浮式风机支撑平台的结构尺寸相比于固定式风机更大,因此其水动力荷载不能完全采用Morison经验公式进行简化计算,而需要采用势流理论甚至计算流体力学的方法。
对于立柱型漂浮式风机,其重心设计低于浮心,浮体具有自稳特性,水线面较小,因此所受到的波浪荷载也较小;但由于顶部风轮高程较高,在额定风速下,风倾力矩容易导致较大的平台纵摇。通过合理的设计,其平台运动固有周期可以避开一阶波浪力周期范围,也对二阶波浪力不敏感。立柱型漂浮式平台不同方向的运动之间会有耦合响应,相关的数值和试验研究发现当立柱型漂浮式平台的垂荡周期大约为纵摇周期2倍关系时,会出现明显的垂荡-纵摇耦合效应,继而诱发较大的垂向运动,影响立柱型漂浮式平台的性能,这种现象称为“Mathieu instability (马修不稳定)”,设计时需要格外注意。另外,由于立柱型漂浮式风机通常由单立柱构成,因此在海流载荷的作用下容易在立柱主体两侧产生交替性漩涡,使得结构物出现周期性的脉动压力,继而引发涡激运动。由于涡激运动共振时存在“锁频”(Lock-in)现象,其共振的流速范围可能较大,对立柱型漂浮式风机设计而言,也是需要格外注意。
对于半潜型漂浮式风机,其六自由度运动的耐波性适中,通过合理的漂浮式支撑平台设计,能使得平台运动固有频率避开一阶波浪力峰值频率范围,因此半潜型漂浮式风机适用的海域和水深范围较广。由于通常的半潜型漂浮式风电设计中,重心位于浮心之上,且间距并不大,稳性校核时具有极限倾斜角限制。其纵荡/横荡运动固有频率取决于系泊刚度,通常较小,因此可能对二阶差频波浪力敏感。同时,差频波浪力会产生定常的平均波浪拖曳力,使得浮体受到非周期的拖曳载荷作用,继而发生平均位置的偏移,这些都需要格外注意。
对于张力腿型漂浮式风机,该类型平台通过系泊垂向张力平衡浮体的超额浮力;因此,具有较好的垂向运动性能;但是在水平方向,如纵荡、横荡和首摇运动较为柔软,在受到风轮气动推力荷载时,水平运动幅度可能较大,继而会导致各个张力腿受力不均匀而产生耦合垂向运动。另外,由于张力腿型漂浮式风机的垂向运动固有频率高于一阶波浪力频率区域,但容易发生波浪二阶和频的高频共振。
海上漂浮式风机的水动力计算主要借鉴于海洋工程结构物水动力计算方法,主要有半经验方法,如莫里森法(Morison) ;势流计算方法,如弗汝德-克雷洛夫(Froude-Krylov)力计算方法、边界元法和三维面元法;计算流体动力学方法等。
5气动力特性的研究
与传统的固定式海上风机相比,漂浮式风机的平台基础约束较弱,导致风轮的气动载荷存在明显的非线性特征。单个海上漂浮式风机的气动特性研究可大致划分为三方面,一是浮式平台基础对顶部风轮的气动性能的影响;二是风轮气动载荷对平台基础运动的影响;三是气动载荷与结构振动等动力响应的耦合,即气弹性问题。
气动载荷对漂浮式风机运动的影响主要可以分为气动激励载荷和气动阻尼载荷;气动激励载荷,如气动推力会使得漂浮式风机的支撑平台发生较大的纵荡和纵摇运动。
气弹性问题一直都是风力设备研究的重点考虑因素,相比于固定式风机,漂浮式风机的平台运动更明显,导致气动载荷波动更大,结构惯性载荷更大,导致更加明显的桨叶和塔筒结构振动,甚至引发平台基础的高频运动。
6结构安全性的研究
结构安全性研究主要分为结构极限载荷,结构共振,疲劳分析等方面。
结构极限载荷:漂浮式风机与固定式风机的最主要区别是浮式平台的波频运动(位移、速度和加速度)将引起额外的结构载荷、振动、疲劳。
结构共振:需要分析结构的振动自然周期与波浪周期的关系,避免发生结构共振。
疲劳分析:需要依据波浪长期散布图进行结构疲劳分析。
7经济性的研究
经济性主要考虑建设风机时的风机功率及平台用钢量、建造难度,系泊形式、系泊缆材质和数量,锚固基础形式及数量,运输安装费用,可靠性及运维费用等方面,综合多方考虑,以经济的方式建设风场。
结语
近年来,海上漂浮式风电技术伴随全球海上风电商业化开发热潮而日趋成熟,并处于商业化起始阶段。对于中国海上风电行业而言,开展漂浮式风电技术研究和工程化实践,有助于拓展海上风电空间范围,是海上风电行业可持续发展的重要方向,也是我国未来保持海上风电产业竞争优势的重要抓手。
本文综述了海上漂浮式风机基本形式,关键技术研究现状,相关工程挑战,对我国现阶段的漂浮式技术研究和相关工程项目开展提供了较为全面的技术参考。

 正在加载...
正在加载...