切换行业
切换行业

导读
近年来我国海上风电快速发展,装机容量越来越大,风机数量越来越多,出海运维作业任务愈发繁重。海上环境复杂多变,在风、浪、流等作用下,运维船船体将产生横摇、纵摇、升沉等多自由度运动,即使运维船顶靠风机基础,这些运动也无法完全避免,因此,运维人员从运维船换乘至爬梯相当困难,且面临极大危险,安全事故时有发生。海上风电运维面临更多风险和挑战。
海上风电运维过程中,降低运维船和登陆平台之间人员换乘的风险,提高换乘作业效率,成为亟待解决的问题。专业的海上风电运维登乘装置,能够在运维船舶和风电基础之间搭建起安全通道,保障海上风电运维过程中人员及物资安全转移,是当前解决海上运维登乘问题的有效手段,目前登乘装置较为有代表性的是补偿舷梯。

船用舷梯的发展现状
舷梯装置由舷梯及其收放机构组成,一般设置在船体舱壁或干舷甲板以上,以及舷边未被外板封闭的通道处。使用时,利用收放机构将舷梯移出船外,紧靠船外板斜置于船旁,供人员登\离船舶。
舷梯分类:舷梯按材质分为钢质舷梯、铝质舷梯及钢铝混合舷梯;按布置收藏型式分为翻转式舷梯和平移收藏式舷梯;按踏步分为固定弧形踏步舷梯和活动踏步式舷梯;按结构又可以分为整体式、伸缩式和两节式舷梯。
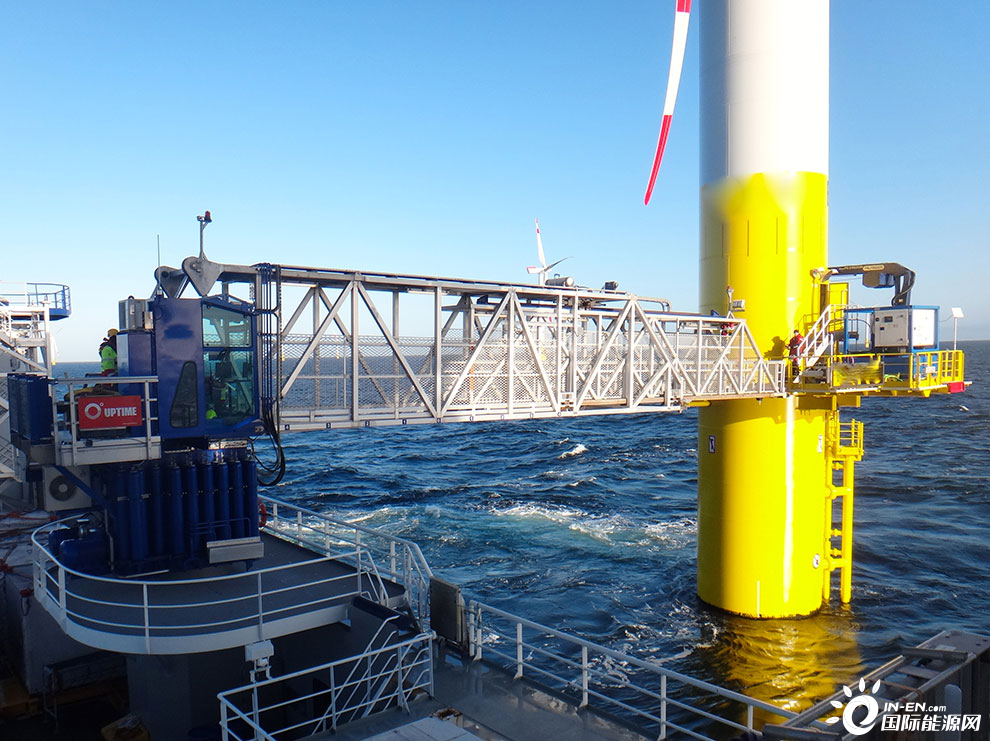
在海上风电场的运维过程中,由于不可避免的受到海况影响,因此为适应运维需求,兼顾人员和货物的运输以及登靠的安全性、稳定性来看,带有波浪补偿技术的舷梯可以很好地适应海况,有效提高海上通达率。
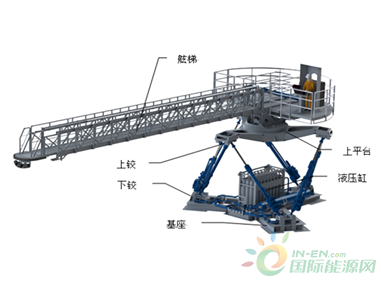
图1 六自由度补偿舷梯

图2 无补偿舷梯
欧洲著名海上风电船东DEME发布了Siemens Gamesa采购的为海上风电运维服务的、创新小水线面双体运维船。该船配备了SMST公司的运动补偿舷梯,即使在2.5米波高海况下,也可以将运维人员转移到风机平台。

图3 双体运维船
英国的Houlder公司和BMT Nigel Gee公司针对无动力定位系统的船舶设计开发了TAS人员换乘系统。TAS是一种动态补偿平台,可为海上风机、海上建筑物与船舶之间提供安全、稳定的通道,与传统的登乘方式相比,提高了安全性和海上作业效率。

图4 Houlder-TAS系统
荷兰Barge Master系统是Barge Master公司和 Bosch Rexroth公司合作开发的海上换乘系统,适用于船与海上风机、海上建筑之间的换乘。通过俯仰液压缸来补偿垂荡方向的运动,同时,该海上换乘舷梯具有一定的吊运能力。

图5 Barge Master系统
为了保障海上登乘舷梯的安全、功能和质量,2015年,DNV GL船级社发布了全球首个海上登乘舷梯标准文件—Offshore gangways;2016年,ABS船级社发布了认证指南文件—OFFSHORE ACCESS GANGWAYS,BV船级社发布了认证指南文件—Certification of Offshore Access Systems,这些标准文件对海上登乘舷梯的材料、强度、安全性、功能、测试和跟踪服务等方面做了要求,为海上登乘舷梯设计提供依据。
Uptime公司“步行上班”运动补偿舷梯

运动补偿舷梯的技术分析
1三自由度补偿舷梯系统
运动补偿舷梯常见的有三自由度的运动补偿系统和六自由度的运动补偿系统。三自由度运动补偿舷梯系统,主要由回转基座、伸缩舷梯、俯仰机构等组成。当运维船舶发生横摇、纵摇、升沉( 垂荡) 三个自由度的运动时,舷梯做伸缩、俯仰、转动等三维运动实现有效补偿,从而使工作人员及货物更加安全平稳的通过桥梯。
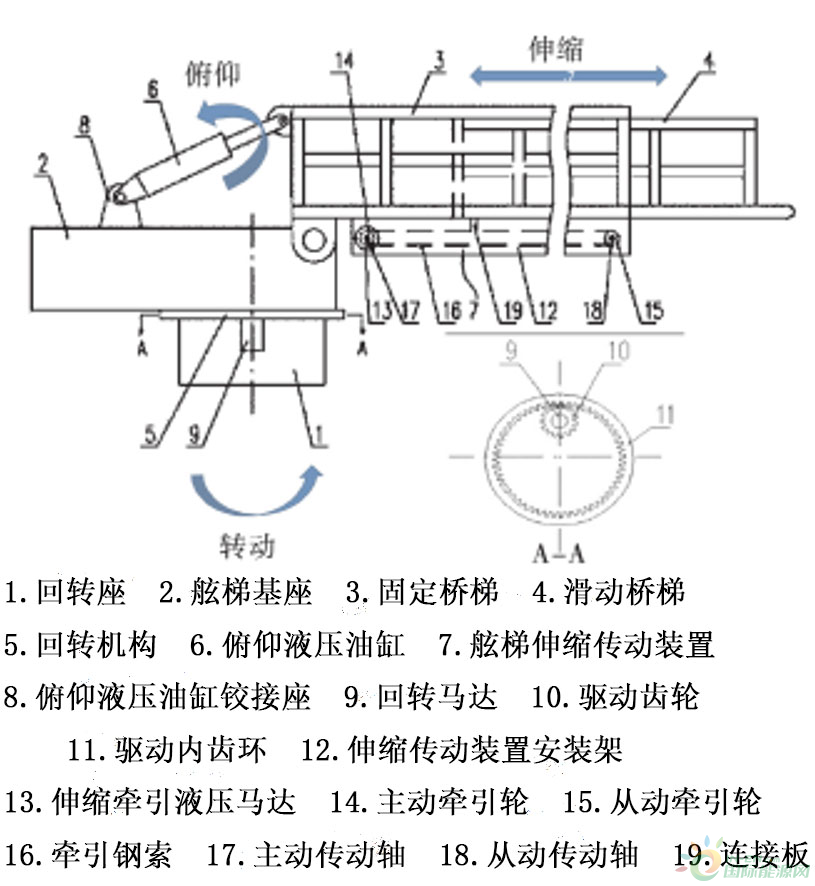
图6 三自由度补偿舷梯系统图
船体横摇主要通过舷梯的伸缩、俯仰和回转运动实现补偿。舷梯伸缩运动可采用不同的机构实现,例如液压油缸、钢丝绳等。船体纵摇主要通过舷梯的伸缩和俯仰实现补偿。船体的升沉主要通过舷梯的俯仰、伸缩来实现补偿,俯仰机构由两个单作用液压缸驱动,活塞杆末端连接到第一节梯架两侧,液压缸末端连接到回转机构上。液压缸可置于梯架的下部,也可设计为作用于梯架的上部。

乌斯坦为GE建造的SOV搭载了Uptime公司运动补偿旋梯
2多自由度补偿舷梯系统
对于海况更加恶劣的深远海,三自由度补偿通常难以满足作业需要,此时需要更强补偿能力舷梯系统。典型的如Ampelmann公司的补偿舷梯系统,其基本概念最早在2002年柏林举行的风能会议期间发布。Ampelmann六自由度补偿舷梯系统将舷梯平台安装在六自由度液压补偿平台顶部,采用液压平台和运动传感器集成方式,实现快速和准确的运动控制。
Ampelmann廊桥系统将液压油缸和运动传感器数据结合,实现六自由度主动运动补偿。为保证人员转运安全,需要考虑运动控制是否足够快并且尽可能准确地使液压平台顶部运动最小化,其运动控制过程包括:
首先从传感器获得船舶的六自由度运动参数,高速控制器将这些运动参数进行解算分析,从而获得所需的液压缸行程。高速控制器的阀控模块随后将控制信号送到相应的液压缸。其中阀控信号采用两种方法来确定:比例控制和前馈控制。比例控制主要用来调整实际液压缸位置偏差;前馈控制则实现对增压缸速度的调整;这两者获得的控制信号也仅为预控信号。考虑到阀件特性的差异和非线性,最后综合获得最终的液压缸的控制信号。
虽然补偿平台的结构形式与一般的六自由度液压平台类似,但是针对风机登靠用的运动补偿平台的控制不同于一般并联六自由度的控制。除了上面提到的根据船体实时位姿状态进行补偿外,同时还需要尽可能预测下一时刻的位姿状态,用下一时刻的数据指令控制平台动作,以便克服机械液压系统的时滞,使平台姿态始终与船体姿态即时对应。

Uptime推出了世界上首个海上风电智能舷梯
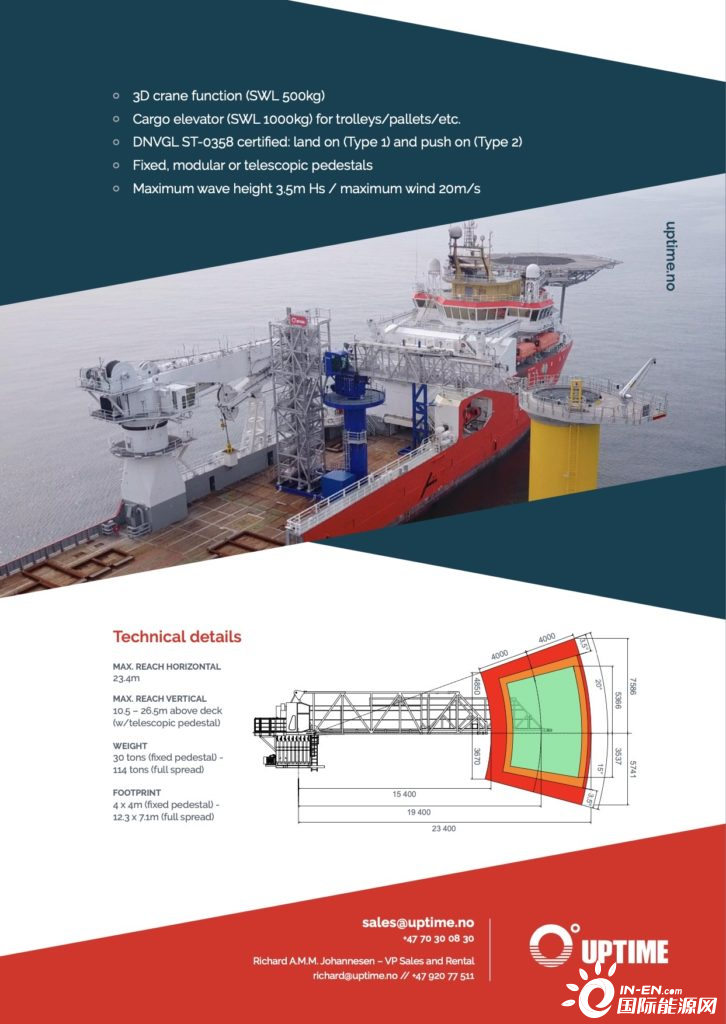
Uptime 带3D补偿海上风电舷梯介绍页
结语
国外风电产业起步早,发展充分,因此运维技术较为成熟。与国外相比,国内风电运维设备和船舶、运维船的建造基本落后国外5~10年。目前,国内在海上风电运维登乘装备研究方面已经开展了相关工作,高校、研究所、企业均有涉及,但大部分工作还处于理论研究阶段,真正进入实践阶段的数量较少,相关的标准规范在探索中。
总的来说,国内海上风电运维登乘装备研发尚处于起步阶段,与欧洲存在较大差距,并且目前国内缺少海上登乘装备相关标准规范,在一定程度上制约了发展。
随着国内海上风电开发快速、规模化推进,与之配套的运维设施和风机平台登靠系统也逐渐成为刚需。如果直接从国外引进先进设备,目前的引进费用较高,并且国内风电运维方式、海域环境与国外有明显不同,直接引进会造成设备水土不服。因此,亟需开发针对国内海况、国内运维方式、具备高可靠性的登乘装备,补齐国内海上风电产业在此方向的短板。
千尧科技(北京千尧新能源科技开发有限公司)勇担行业使命,潜心专研技术,攻克重重难关,自主研发并推出了国内首台“海上风电运维登乘廊桥”,打破了国外同行在该领域的技术垄断,并于江苏、福建 海域的海上风电场示范应用,已具备 2 个系列(GWA、GWP)、多种型号的批量化生产交付能力,涵盖主动式、混动式运动补偿功能,在运维船与海上风机基础之间搭建安全转移通道,保障人员换乘安全,增加有效作业窗口期,提升运维效率,填补了国内市场空白。

 正在加载...
正在加载...