前面说到风电机组也有“眼睛”、“耳朵”,它们可以“眼观六路”、“耳听八方”,那么它们是不是也可以像人类一样,能够自己思考,自己做一些事情呢?答案是定肯定的,有很多事情,风电机组能够通过自主判断,完成相应的动作,并且还能提升机组稳定性,提高发电量。下面就让我们一起看看,它都有哪些技能呢。
● 独立变桨技术
随着风电技术的日益发展,以及整体制造业水平的提高,风电机组正朝着单机容量、塔筒高度以及风轮直径的日益增大的方向发展,由于存在风切变及湍流等因素的影响,机组所承受的俯仰弯矩、偏航弯矩大大增加。研究发现根据每个叶片不同的运行情况分别独立给予一定角度的调整,这样就可以有效地解决统一变桨中水平轴风机由于风切变及湍流等因素引起的叶片和塔筒等部件的载荷不平衡问题。风电机组独立变桨技术能够降低风切效应,塔影效应带来的影响,降低风电机组的疲劳载荷及部分工况的极限载荷。
● 预变桨技术
风向来是千变万化的,这对于风力发电来说可不是什么好事。风速的频繁波动,阵风、湍流、风切变效应等不仅影响机组的最大功率追踪,而且还会加剧叶片在挥舞、摆振方向的弯曲和位移,进而影响叶片的疲劳载荷,不利于风机的长期安全可靠运行。有没有一种办法,在知道风况变化的前提下,让机组提前做出相应的应对措施,这就衍生出了预变桨技术。结合先进的激光雷达测风技术,测得风况变化的时间序列,再通过一定的算法,提前给出变桨角度,就能实现风电机组的预变桨。预变桨技术能有效避免风电机组失速,降低机组在低空气密度下的失速风险,提升机组稳定性并减少发电量损失。

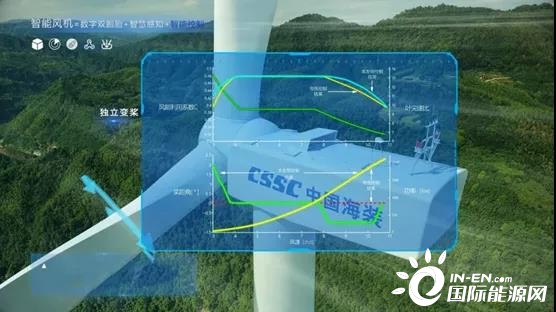
● 变桨自寻优
变桨自寻优是通过优化控制算法,以达到稳定功率的控制目标。具体做法是基于GH Bladed软件得出风电机组的高阶线性化模型,利用Matlab软件辨识出既满足精度要求,又可进行参数寻优的低阶模型,然后采用差分进化算法优化变桨PI控制器参数,利用寻优得到的参数进行变增益变桨控制。变桨自寻优技术能够对不同的机位点环境进行自适应调整的同时,有效提升发电量。
● 电磁阻尼振动抑制
偏航系统是风电机组在既有风况条件下实现机组最大发电的关键系统,传统偏航系统在偏航动作过程中强烈的刹车摩擦带来的噪音和机械冲击等问题影响机组的稳定运行,同时刹车片的磨损也大幅提高了风电机组的维护成本和运维时间。为解决这一问题,中国海装研究院团队创造性的采用了电机电磁阻尼力矩作为偏航保持力矩,突破传统液压制动提供偏航保持力矩的禁锢,实现了“零压偏航”。相比于传统偏航系统,电磁阻尼偏航系统可解决风电机组偏航系统的噪音、摩擦、机械冲击等问题,并可实现更加精准的偏航。
● 偏航YADA控制算法
YADA算法(Yaw Angle Dynamic Algorithm)是偏航角度稳瞬态偏差实时跟踪与动态控制算法的简化名词。YADA算法需要结合偏航传动控制、偏航角度测量、载荷安全、运行状态和风况数据等信息,主要定向“打击”目标:一是提高偏航对风精度;二是降低无效偏航。该技术的应用可有效降低机组偏航次数,减少自耗电,延长偏航系统部件寿命,同时提高偏航精度,提升理论机组发电量。